引言:
在线性表中,数据元素之间是被串起来的,仅有线性关系,每个数据元素只有一个直接前驱和一个直接后继。在树形结构中,数据元素之间有着明显的层次关系,并且每一层上的数据元素可能和下一层中多个元素相关,但只能和上一层中一个元素想关。这和一对父母可以有多个孩子,但每个孩子却只能有一对父母是一个道理。可现实中,人与人之间关系就非常复杂,比如我认识的朋友,可能他们之间也相互认识,这就不是简单的一对一、一对多的关系,研究人际关系很自然就会考虑到多对多的情况。也就是这篇博客的主题——图。图是一种较线性表和树更加复杂的数据结构。在图形结构中,节点之间的关系可以是任意的,图中任意两个数据元素之间都可能相关。
一、图的相关定义
1、图:
图(Grap)是由顶点的有穷非空集合和顶点之间的边集合组成,通常表示为:G(V,E),其中,G表示一个图;V是图G中顶点的集合;E是图G中边的集合。
- 通常线性表中我们把数据元素叫做元素,树中将数据元素叫做结点,在图中数据元素,则称之为顶点(Vertex)。
- 线性表中可以没有数据元素,称为空表。树中可以没有结点,叫做空树。但是在图结构中,不允许没有顶点。在定义中,若 V 是顶点的集合,则强调了顶点集合 V 有穷非空。
- 在线性表中,相邻的数据元素之间具有线性关系;在树结构中,相邻两层的结点具有层次关系。而在图中,任意两个顶点之间都可能有关系,顶点之间的逻辑关系用边来表示,边集可以是空的。
2、无向边:
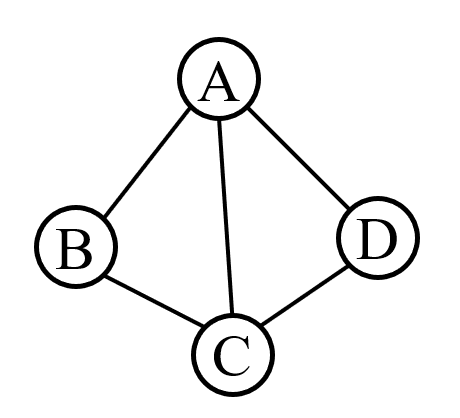
示意图 说明 若顶点 Vi 到 Vj 之间的边没有方向,则称这条边为无向边(Edge),用无序偶对(Vi,Vj)来表示。如果图中任意两个顶点之间的边都是无向边,则称该图为无向图。左侧就是一个无向图,由于是无方向的,连接顶点A与D的边,可以表示成无序对(A,D),也可以写成(D,A)。
3、有向边:
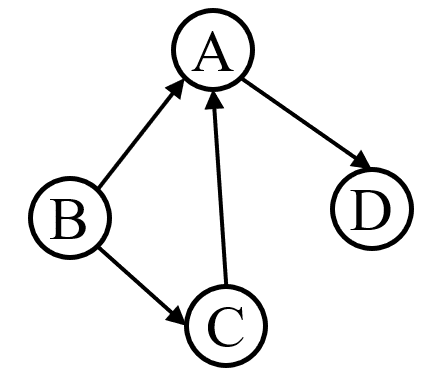
示意图 说明 若从顶点 Vi 到 Vj 之间的边有方向,则这条边为有向边,也称为弧(Arc)。用有序偶<Vi,Vj>来表示,Vi称为弧尾(Tail),Vj称为弧头(Head)。如果图中任意两个顶点之间的边都是有向边,则称该图为有向图。左图就是一个有向图,连接顶点A到D的有向边就是弧,A是弧尾,D是弧头,<A,D>表示该弧,不能写成<D,A>
4、简单图:
- 在图中,若不存在顶点到其自身的边,且同一条边不重复出现,则称这样的图为简单图。
5、完全图:
- 在无向图中,如果任意两个顶点之间都存在边,则称该图为无向完全图。含有n个顶点的无向完全图有n*(n-1)/2条边。
- 在有向图中,如果任意两个顶点之间都存在方向互为相反的两条弧,则称该图为有向完全图。含有n个顶点的有向完全图有n*(n-1)条边。
- 这里可以得出结论,对于具有n个顶点和e条边数的图,无向图 0≤e≤n(n-1)/2,有向图 0≤e≤n(n-1)
6、网(带权图)
有些图的边或者弧具有与它相关的数字,这种与图的边或弧相关的数叫做权(Weight)。这些权可以表示从一个顶点到另一个顶点的距离或耗费。这种带权的图通常称为网。
7、子图
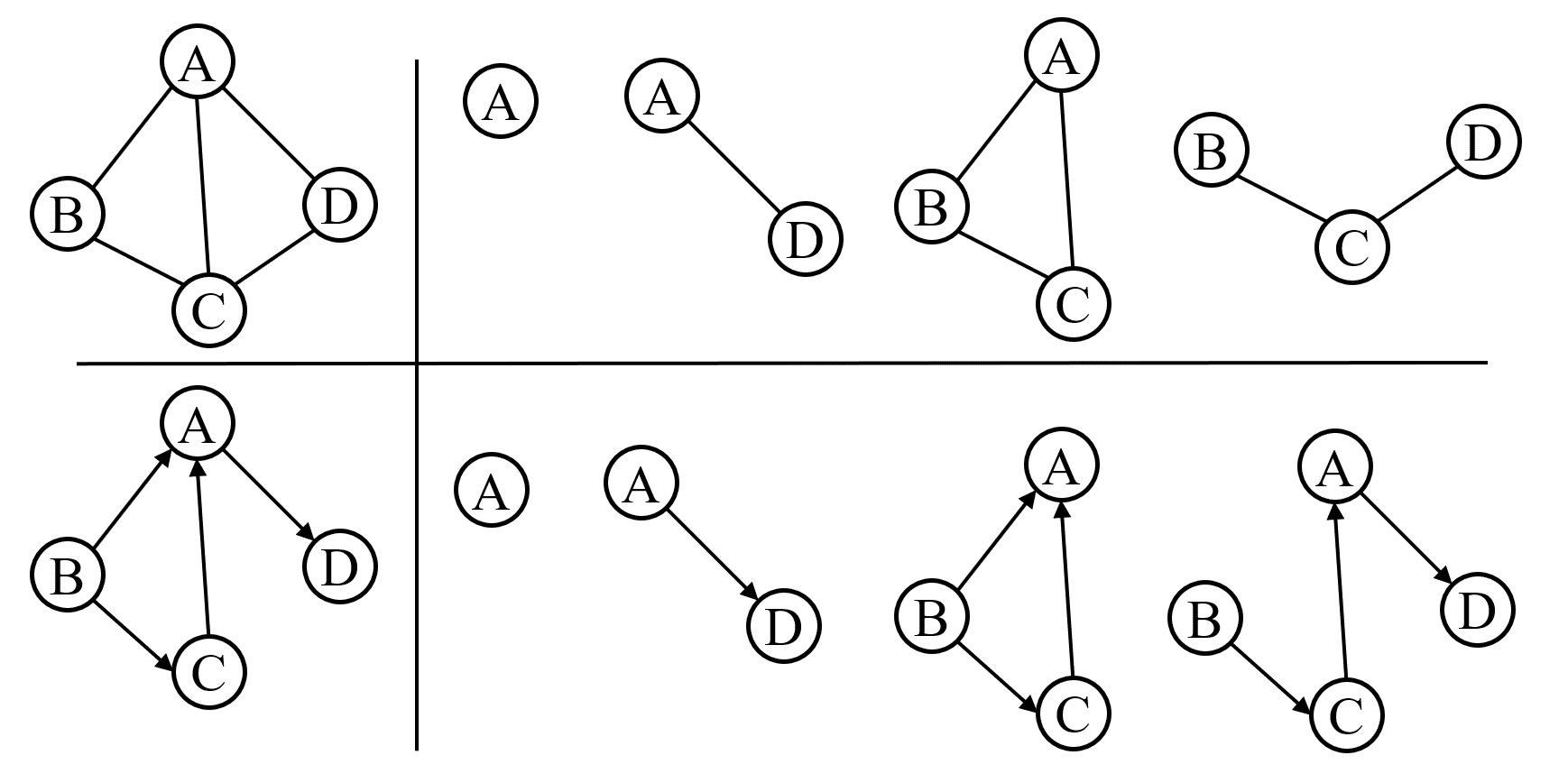
示意图 说明 假设有两个图 G = (V,{E})和 G‘ = (V‘,{E‘}),如果V‘∈V且E‘∈E,则称G‘为G的子图。例如左侧所示的有向图和无向图的子图。
8、图的顶点与边之间的关系
对于无向图:
无向图 G = (V,{E}),如果边(V,V‘)∈E,则称顶点V和V‘互为邻接点(Adjacent),即V和V‘相邻接。边(V,V‘)依附(incident)于顶点V和V‘,或者说(V,V‘)与顶点V和V‘相关联。顶点V的度(Degree)是和V相关联的边的数目,记为 TD(V)。如上图A与B互为邻接点,边(A,B)依附于顶点A与B上,顶点A的度为3。其实边数就是各顶点度数和的一半,多出的一半是因为重复计数了。
对于有向图:
有向图 G = (V,{E}),如果弧<V,V‘>∈E,则称顶点V邻接到顶点V‘,顶点V‘邻接自顶点V。弧<V,V‘>和顶点V,V‘相关联。以顶点v为头的弧的数目称为V的入度,记为 ID(V);以V为尾的弧的数目称为V的出度,记为OD(V);顶点V的度为TD(V)=ID(V)+OD(V)。其实边数就是各顶点的出度和,也是各顶点的入度和。
9、路径和环
无向图 G = (V,{E}) 中从顶点V到顶点V‘的路径是一个顶点序列(V=Vi,0,Vi,1······Vi,m=V‘),其中(Vi,j-1,Vi,j)∈E,1≤j≤m。如果 G 是有向图,则路径也是有向的,顶点序列应满足<Vi,j-1,Vi,j>∈E,1≤j≤m。
树中根结点到任意结点的路径是唯一的,但是图中顶点与顶点之间的路径却是不唯一的。路径的长度是路径上的边或弧的数目。第一个顶点到最后一个顶点相同的路径称为回路或环。序列中顶点不重复出现的路径称为简单路径。除了第一个顶点和最后一个顶点之外,其余顶点不重复出现的回路,称为简单回路或简单环。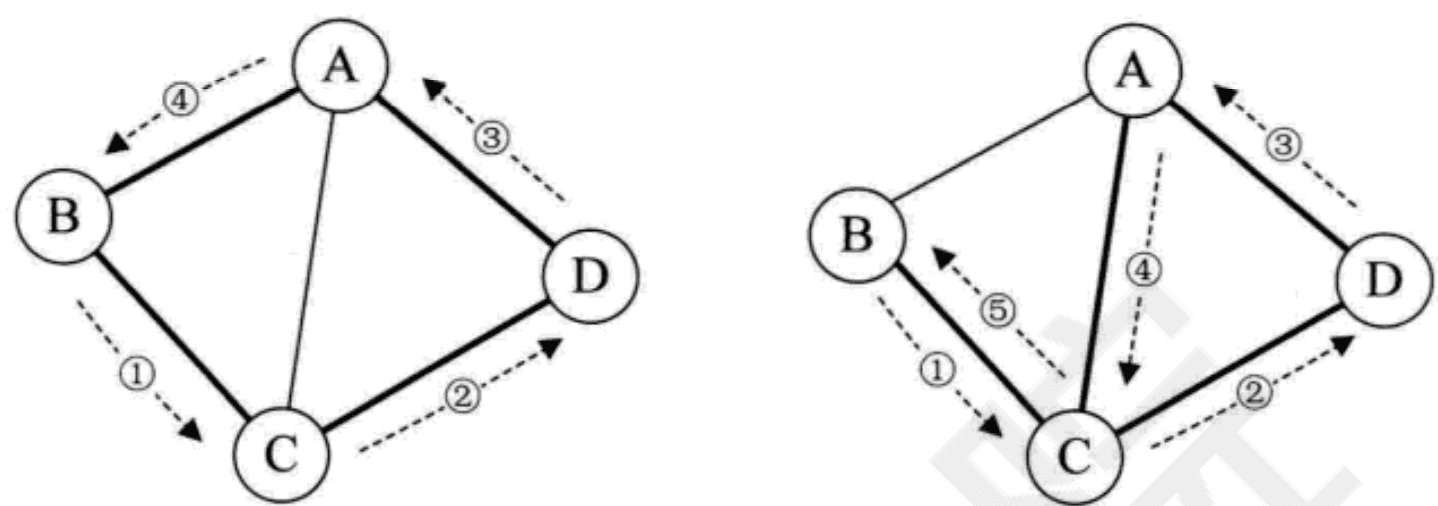
10、连通图相关术语
无向图中
在无向图 G 中,如果从顶点V到顶点V‘有路径,则称V和V‘是连通的。如果对于图中任意两个顶点Vi、Vj∈V,Vi和Vj都是连通的,则称 G 是连通图。无向图中的极大连通子图称为连通分量。连通分量强调:
- 要是子图;
- 子图要是连通的;
- 连通子图含有极大顶点数;
- 具有极大顶点数的连通子图包含依附于这些顶点的所有边。
有向图中
在有向图 G 中,如果对于每一对Vi、Vj∈V、Vi≠Vj,从Vi到Vj和从Vj到Vi都存在路径,则称 G 是强连通图。有向图中的极大强连通子图称做有向图的强连通分量。
11、连通图的生成树
所谓的一个连通图的生成树是一个极小的连通子图,它含有图中全部的 n 个顶点,但只有足以构成一棵树的 n-1 条边。如果一个图有 n 个顶点和小于 n-1 条边,则该图是非连通图。如果它有多于 n-1 条边,则必定构成一个环,因为这条边使得它依附的那两个顶点之间有了第二条路径。不过有 n-1 条边,并不一定是生成树。
如果一个有向图恰好有一个顶点的入度为0,其余顶点的入度均为1,则是一颗有向树。对有向树的理解比较容易,所谓入度为0其实就相当于树中的根结点,其余顶点入度为1就是说树的非根节点的双亲只有一个。一个有向图的生成森林由若干棵有向树组成,含有图中全部顶点,但是有足以构成若干棵不相交的有向弧。
12、图的定义与术语总结
- 图按照有无方向分为无向图和有向图。无向图由顶点和边构成,有向图由顶点和弧构成。弧有弧尾和弧头之分。
- 图按照边或弧的多少分为稀疏图和稠密图。如果任意两个顶点之间都存在边叫完全图,有向图的叫有向完全图。若无重复的边或顶点到自身的边叫简单图。
- 图中顶点之间有邻接点、依附的概念。无向图顶点的边数叫做度,有向图顶点分为入度和出度。
- 若图上的边或弧带权,则称为网。
- 图中顶点间存在路径,两顶点存在路径则说明是连通的,如果路径最终回到起始点则称为环,当中不重复叫简单路径。若任意两顶点都是连通的,则图就是连通图,有向则是强连通图。图中有子图,若子图极大连通则就是连通分量,有向图则称为强连通分量。
- 无向图中连通且 n 个顶点 n-1 条边叫做生成树。有向图中一顶点入度为0,其余顶点入度为1的叫做有向树。一个有向图由若干棵有向树构成生成森林。
二、连通图的最小生成树算法
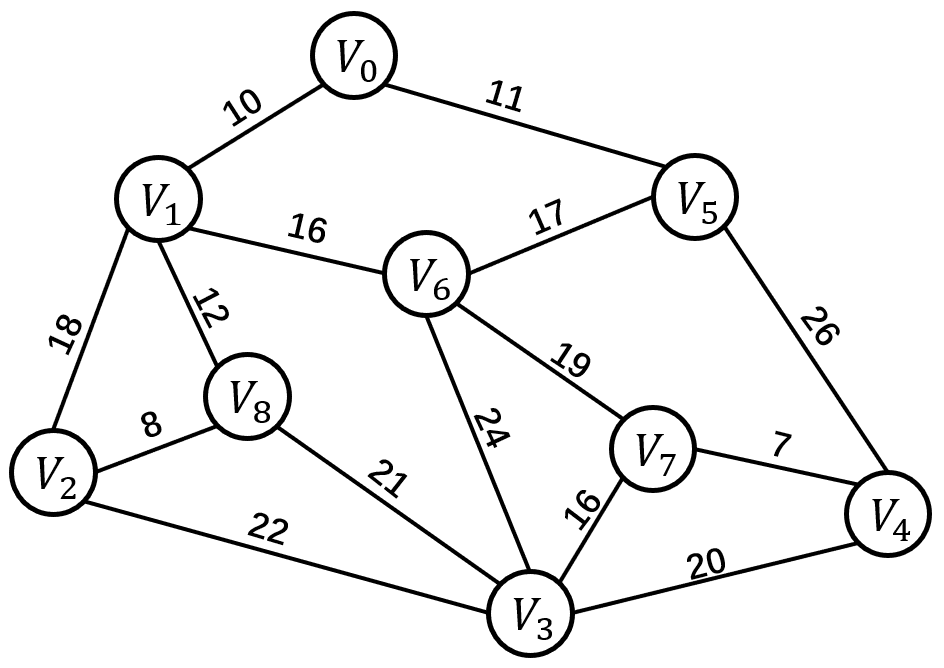
如上是一个带权值的图,即网结构。所谓的最小成本,就是 n 个顶点,用 n-1 条边把一个连通图连接起来,并使得权值的和最小。
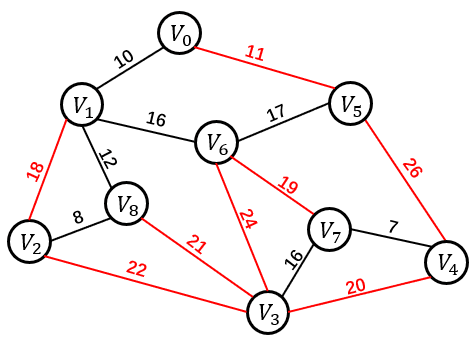
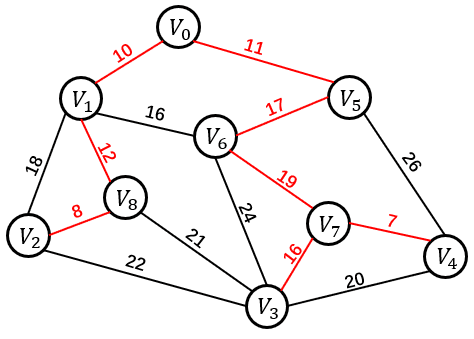
| 方案一 | 方案二 | 方案三 |
|---|---|---|
 |
 |
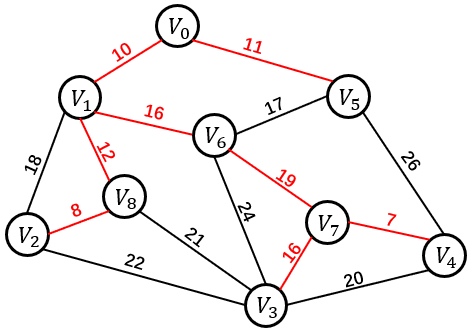 |
| 11+26+20+22+18+21+24+19=161 | 8+12+10+11+17+19+16+7=100 | 8+12+10+11+16+19+7=99 |
一个连通图的生成树是一个极小的连通子图,它含有图中全部的顶点,但只有足以构成一颗树的 n-1 条边。以上三个方案都是上图的生成树。我们将构造连通网的最小代价生成树称为最小生成树。
1、普里姆算法(Prim)
| 带权连通图 | 邻接矩阵 |
|---|---|
|
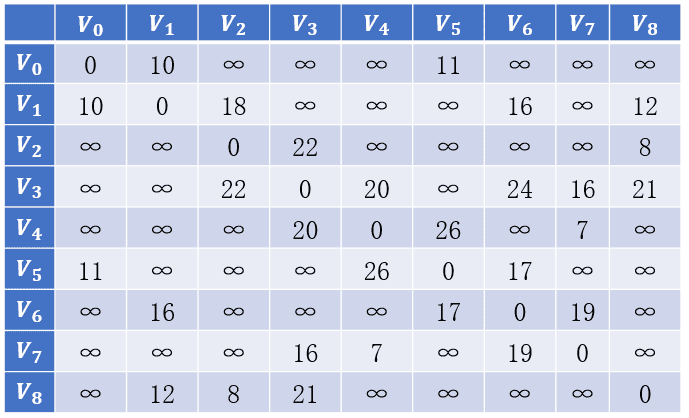 |
普里姆(Prim)算法的实现过程定义如下:假设 N = (P,{E}) 是连通图,TE 是 N 上最小生成树中边的集合。算法从 U = {u0} (u0∈V),TE = {} 开始。重复执行以下操作:在所有 u∈U,v∈V-U 的边 (u,v)∈E 中找一条代价最小的边 (u0,v0)并入集合TE,同时v0并入U,直到 U = V 为止。此时 TE 中必有 n-1 条边,则 T = (V,{TE}) 为 N 的最小生成树。由算法代码中的循环嵌套可得知此算法的时间复杂度为 O(n2)
class MGrap {
final int INFINITY = 65535;//很大很大的数
int numVertexes = 9;
int[][] arc = {{0, 10, INFINITY, INFINITY, INFINITY, 11, INFINITY, INFINITY, INFINITY},
{10, 0, 18, INFINITY, INFINITY, INFINITY, 16, INFINITY, 12},
{INFINITY, INFINITY, 0, 22, INFINITY, INFINITY, INFINITY, INFINITY, 8},
{INFINITY, INFINITY, 22, 0, 20, INFINITY, 24, 16, 21},
{INFINITY, INFINITY, INFINITY, 20, 0, 26, INFINITY, 7, INFINITY},
{11, INFINITY, INFINITY, INFINITY, 26, 0, 17, INFINITY, INFINITY},
{INFINITY, 16, INFINITY, INFINITY, INFINITY, 17, 0, 19, INFINITY},
{INFINITY, INFINITY, INFINITY, 16, 7, INFINITY, 19, 0, INFINITY},
{INFINITY, 12, 8, 21, INFINITY, INFINITY, INFINITY, INFINITY, 0}};
}
public class GrapTest {
@Test
public void test() {
MGrap g = new MGrap();
MiniSpanTree_Prim(g);
}
public void MiniSpanTree_Prim(MGrap G) {
int min, i, j, k;
int[] adjvex = new int[G.numVertexes];
int[] lowcost = new int[G.numVertexes];
lowcost[0] = 0;//相当于先将 V0 加入生成树
adjvex[0] = 0;
//lowcost[i]永远代表的是边adjvex[i]-->i的代价
for (i = 1; i < G.numVertexes; i++) {
lowcost[i] = G.arc[0][i];// V0到其他各顶点的代价,因为目前生成树中只有V0
adjvex[i] = 0;
}
for (i = 1; i < G.numVertexes; i++) {
min = G.INFINITY;
j = 1; k = 0;
while (j < G.numVertexes) {
//已经加入到最小生成树中的顶点,其对应的lowcost值为0
if (lowcost[j] != 0 && lowcost[j] < min) {
min = lowcost[j];
k = j;
}
j++;
}
lowcost[k] = 0; //将 Vk 加入生成树
System.out.println(adjvex[k] + " --> " + k);//打印拥有最小权值的边
//新的顶点加入到生成树集合后,lowcost和adjvex数组会有相应的变化
for (j = 1; j < G.numVertexes; j++) {
if (lowcost[j] != 0 && G.arc[k][j] < lowcost[j]) {
lowcost[j] = G.arc[k][j];
adjvex[j] = k;
}
}
}
}
}2、克鲁斯卡尔算法(Kruskal)
普里姆(Prim)算法是以某顶点为起点,逐步找各顶点上最小权值的边来构建最小生成树。其实,我们也可以直接以边为目标区构建,因为权值是在边上,直接去找最小权值的边来构建生成树也是很自然的想法,但是构建时要考虑是否会形成环路。此时要用到图的存储结构中的边集数据结构。
克鲁斯卡尔(Kruskal)算法的实现过程定义如下:假设 N = (V,{E}) 是连通网,则令最小生成树的初始状态为只有 n 个顶点而无边的非连通图 T = {V,{}},图中每个顶点自成一个连通分量。在 E 中选择代价最小的边,若该边依附的顶点落在 T 中不同的连通分量上,则将此边加入到 T 中,否则舍弃此边而选择下一条代价最小的边。依次类推,直至 T 中所有顶点都在同一连通分量上为止。此算法的find函数由边数 e 决定,时间复杂度为 O(log(e)),而外层有一个 for 循环 e 次。所以克鲁斯卡尔算法的时间复杂度为 O(e*log(e))
class Edge {
int begin;
int end;
int weight;
public Edge(int begin, int end, int weight) {
this.begin = begin;
this.end = end;
this.weight = weight;
}
public String toString() {
return begin + "---" + end + ": " + weight;
}
}
class MGrap {
final int INFINITY = 65535;//很大很大的数
int numVertexes = 9;
int numEdges = 15;
int[][] arc = {{0, 10, INFINITY, INFINITY, INFINITY, 11, INFINITY, INFINITY, INFINITY},
{10, 0, 18, INFINITY, INFINITY, INFINITY, 16, INFINITY, 12},
{INFINITY, INFINITY, 0, 22, INFINITY, INFINITY, INFINITY, INFINITY, 8},
{INFINITY, INFINITY, 22, 0, 20, INFINITY, 24, 16, 21},
{INFINITY, INFINITY, INFINITY, 20, 0, 26, INFINITY, 7, INFINITY},
{11, INFINITY, INFINITY, INFINITY, 26, 0, 17, INFINITY, INFINITY},
{INFINITY, 16, INFINITY, INFINITY, INFINITY, 17, 0, 19, INFINITY},
{INFINITY, INFINITY, INFINITY, 16, 7, INFINITY, 19, 0, INFINITY},
{INFINITY, 12, 8, 21, INFINITY, INFINITY, INFINITY, INFINITY, 0}};
}
public class GrapTest {
@Test
public void test() {
MGrap g = new MGrap();
MiniSpanTree_Kruskal(g);
}
public void MiniSpanTree_Kruskal(MGrap G) {
int i, n, m;
Edge[] edges = new Edge[G.numEdges];//边集数组
int[] parent = new int[G.numVertexes];
/*将图的邻接矩阵转换成边集数组edges,并按权值由小到大排序*/
int j, k;
for (i = 0, k = 0; i < G.numVertexes; i++) {
for (j = i + 1; j < G.numVertexes; j++) {
if (G.arc[i][j] < G.INFINITY) {
edges[k++] = new Edge(i, j, G.arc[i][j]);
}
}
}
Arrays.sort(edges, (e1, e2) -> e1.weight - e2.weight);//Lambda表达式
//Arrays.stream(edges).forEach(System.out::println);//方法引用
for (i = 0; i < G.numVertexes; i++) {
parent[i] = 0;
}
for (i = 0; i < G.numEdges; i++) {//循环每条边
//若begin和end在不同的连通分量上,则find函数返回的值不相等。
//相反,若begin和end在同一个连通分量上,则find函数返回的值相等。
n = find(parent, edges[i].begin);
m = find(parent, edges[i].end);
if (n != m) {//此边没有与现生成树形成环
parent[n] = m;
//打印拥有最小权值的边
System.out.println(edges[i].begin + " --> " + edges[i].end);
}
}
}
//在构建生成树的过程中,所有顶点和已经加入的边会形成多个连通分量。
//在同一个连通分量上,任意两个顶点按照以下方法,总会返回相同顶点(注意体会)
int find(int[] parent, int f) {
while (parent[f] > 0)
f = parent[f];
return f;
}
}3、对比分析
对比普里姆(Prim)算法和克鲁斯卡尔(Kruskal)算法可知,kruskal算法主要是针对边来展开,当图中的边数少是效率会非常高,所以对于稀疏图有很大的优势;而Prim算法主要是针对顶点来展开,对于稠密图或者边数非常多的情况效率会好一些。



